Node Storage
Scope
Node Storage concerns how the bounds (bounding box) of nodes are stored during the execution of the DiagramRenderer#draw method. This is a performance feature to avoid the inefficiency of continually re-computing the bounds of nodes during a single diagram rendering pass. The principle behind the Node Storage feature is that the bounding box for a node should only be computed once for a given diagram rendering pass. Because bounding boxes are used in many calculations for node and edge placement, it is necessary to cache the computed value to avoid repeatedly recomputing it.
Overall Design
The feature is supported by a NodeStorage object that maps individual nodes to their corresponding bounds Rectangle. NodeStorage objects are managed by node renderers. In this way, a given node renderer, say NoteNodeRenderer, will cache the bounds for all the NoteNodes of a given diagram.
The following class diagram illustrates how the design is realized with the illustration of a NoteNode (a node that represents a note on a UML diagram).
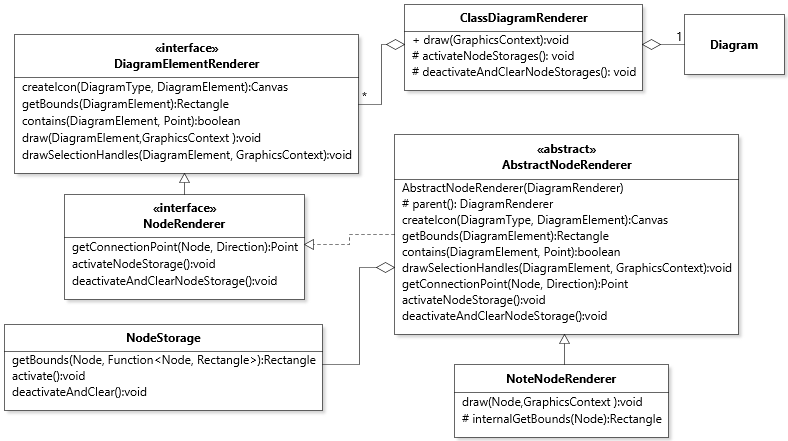
- The (Class)
DiagramRendererdeclares two methods to manage node caching.activateNodeStorages()prepares and activates the cache by going through all its viewers and activating their cache. It should be called once before a diagram is drawn.deactivateAndClearNodeStorages()clears the cache by going through all the viewers and clearing their cache. It should be called once after a diagram is drawn. - For nodes, method
getBounds(DiagramElement)of interfaceDiagramElementRendereris implemented by a final method inAbstractNodeRendererthat delegates the call togetBoundsof classNodeStorage. This call takes as second argument aFunction<Node,Rectangle>that is the bounds calculator. This function object is use to compute the bounds in case of a cache miss. The design of the bounds calculation mechanism is described below.
The following sequence diagram illustrates a scenario where a diagram that contains a single NoteNode is drawn.
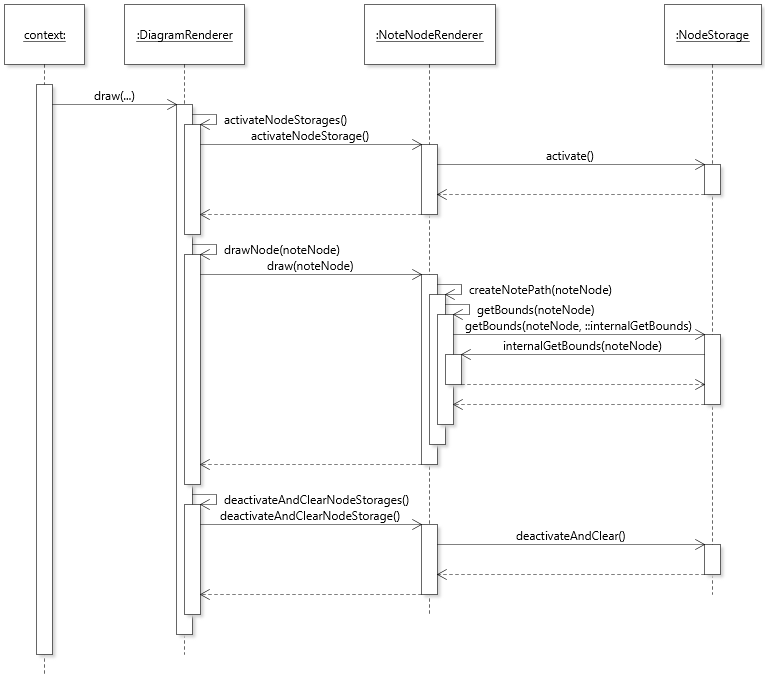
- The top section shows the activation of the node storages (caches). What’s important to note here is that in practice the
DiagramRendereraggregates manyNodeVRendererobjects, so the call toactivateNodeStorage()will be repeated once for each element renderer managed by the diagram renderer. - The middle section shows how the call to
DiagramRenderer#draweventually reachesNoteNodeRenderer#getBounds, because this information is used to draw the node. This results in a call toNodeStorage#getBoundswhere the second argument (::internalGetBounds) is a reference to a instance method of a particular object, namely methodinternalGetBoundsof theNoteNodeRendererobject. - Because there’s a cache miss (the bounds of the note node were never previously computed), the bounds calculator
internalGetBoundsis called to compute and return the bounds. - The bottom section is very similar to the top section, except that now the node storages are cleared.
Bounds Calculation Mechanism
The NodeStorage class is responsible for caching the bounds of different nodes, and computing these bounds for any node not in the cache. This computation requires specialized algorithms to compute the bounds of different nodes. To make it possible to reuse the NodeStorage class for all different types of nodes, its method getBounds takes as second argument a bounds calculator function object of type Function<Node, Rectangle>. The concrete bounds calculators are implemented as protected methods of the NodeRenderer subclasses that implement the abstract method AbstractNodeRenderer#internalGetBounds. For example, in the class diagram above, NoteNodeRenderer implements internalGetBounds with the code to compute the bounds of NodeNodes. With this design in place, the implementation of AbstractNodeRenderer#getBounds is greatly simplified as:
@Override
public final Rectangle getBounds(Node pNode)
{
return aNodeStorage.getBounds(pNode, this::internalGetBounds);
}
Here, the expression this::internalGetBounds is a reference to method internalGetBounds of the NodeRenderer object upon which getBounds gets called. As illustrated in the sequence diagram, when there is a cache miss, this method will be the one called to compute the node’s bounds.